Note
Click here to download the full example code
Navigation on Flat Earth - Example¶
Goals of this script:
apply the UKF on parallelizable manifolds for estimating the 3D attitude, velocity and position of a moving vehicle.
We assume the reader is already familiar with the approach described in the tutorial.
This script proposes an UKF on parallelizable manifolds to estimate the 3D attitude, the velocity, and the position of a rigid body in space from inertial sensors and relative observations of points having known locations by following the setting of [BB17] and [VCSO10]. The vehicle is owed with a three axis Inertial Measurement Unit (IMU) consisting in accelerometers and gyroscopes. Observations of the relative position of known features (using for instance a depth camera) are addressed.
Import¶
from scipy.linalg import block_diag
import ukfm
import numpy as np
import matplotlib
ukfm.utils.set_matplotlib_config()
Model and Simulation¶
This script uses the INERTIAL_NAVIGATION() model that requires
the sequence time and the IMU frequency.
# sequence time (s)
T = 30
# IMU frequency (Hz)
imu_freq = 100
# create the model
model = ukfm.INERTIAL_NAVIGATION(T, imu_freq)
The true trajectory is computed along with noisy inputs after we define the noise standard deviation affecting the (accurate) IMU.
# IMU noise standard deviation (noise is isotropic)
imu_std = np.array([0.01, # gyro (rad/s)
0.01]) # accelerometer (m/s^2)
# simulate true states and noisy inputs
states, omegas = model.simu_f(imu_std)
The state and the input contain the following variables:
states[n].Rot # 3d orientation (matrix)
states[n].v # 3d velocity
states[n].p # 3d position
omegas[n].gyro # robot angular velocities
omegas[n].acc # robot specific forces
Note
The IMU is assumed unbiased. IMU biases are addressed on the IMU-GNSS sensor-fusion problem.
We compute noisy measurements at low frequency based on the true states.
# observation frequency (Hz)
obs_freq = 1
# observation noise standard deviation (m)
obs_std = 1
# simulate landmark measurements
ys, one_hot_ys = model.simu_h(states, obs_freq, obs_std)
A measurement ys[k] contains stacked observations of all visible
landmarks. In this example, we have defined three landmarks that are always
visible.
Filter Design and Initialization¶
We now design the UKF on parallelizable manifolds. This script embeds the state in \(SO(3) \times \mathbb{R}^6\), such that:
the retraction \(\varphi(.,.)\) is the \(SO(3)\) exponential for orientation, and the vector addition for the vehicle velocity and position.
the inverse retraction \(\varphi^{-1}_.(.)\) is the \(SO(3)\) logarithm for orientation and the vector subtraction for the vehicle velocity and position.
Remaining parameter setting is standard. The initial errors are set around 10 degrees for attitude and 1 meter for position in term of standard deviation. These initial conditions are challenging.
# propagation noise covariance matrix
Q = block_diag(imu_std[0]**2*np.eye(3), imu_std[1]**2*np.eye(3))
# measurement noise covariance matrix
R = obs_std**2 * np.eye(3*model.N_ldk)
# initial uncertainty matrix such that the state is not perfectly initialized
P0 = block_diag((10*np.pi/180)**2*np.eye(3), np.zeros((3, 3)), np.eye(3))
# sigma point parameters
alpha = np.array([1e-3, 1e-3, 1e-3])
# start by initializing the filter with an unaccurate state
state0 = model.STATE(
Rot=ukfm.SO3.exp(10*np.pi/180*np.ones(3)/3).dot(states[0].Rot),
v=states[0].v,
p=states[0].p + np.array([1, 0.5, 0.7]))
# create the UKF
ukf = ukfm.UKF(state0=state0, P0=P0, f=model.f, h=model.h, Q=Q, R=R,
phi=model.phi, phi_inv=model.phi_inv, alpha=alpha)
# set variables for recording estimates along the full trajectory
ukf_states = [state0]
ukf_Ps = np.zeros((model.N, 9, 9))
ukf_Ps[0] = P0
Filtering¶
The UKF proceeds as a standard Kalman filter with a for loop.
# measurement iteration number
k = 1
for n in range(1, model.N):
# propagation
ukf.propagation(omegas[n-1], model.dt)
# update only if a measurement is received
if one_hot_ys[n] == 1:
ukf.update(ys[k])
k = k + 1
# save estimates
ukf_states.append(ukf.state)
ukf_Ps[n] = ukf.P
Results¶
We plot the trajectory, the position of the landmarks and the estimated trajectory in the same plot, the attitude error, the position error, and their confidence interval.
model.plot_results(ukf_states, ukf_Ps, states)
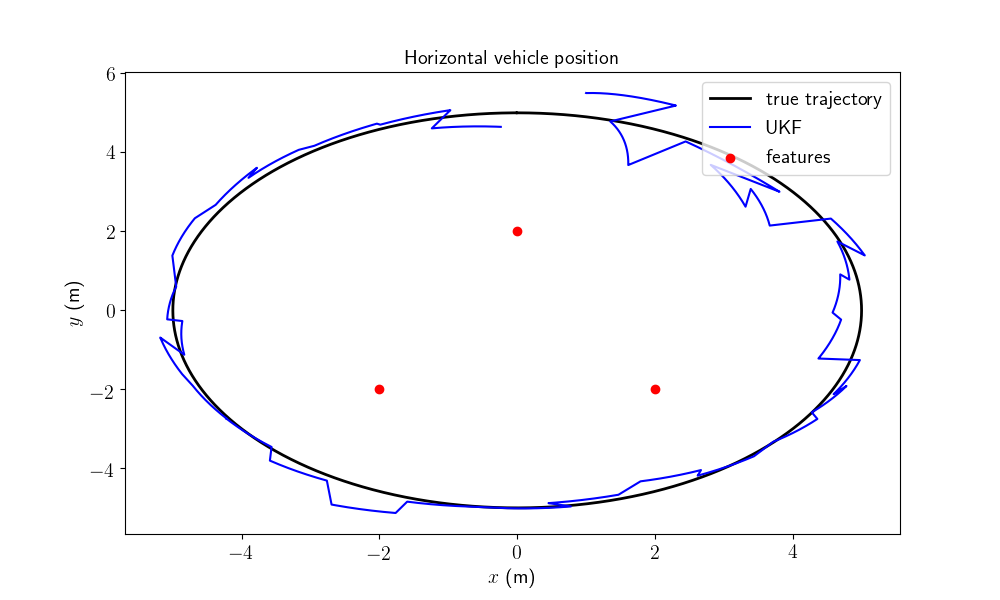
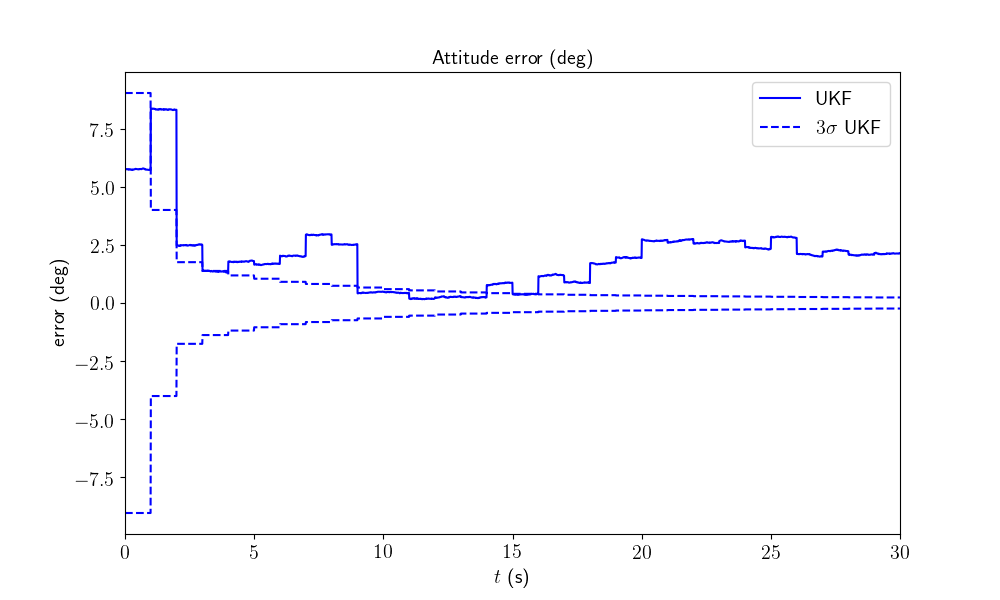
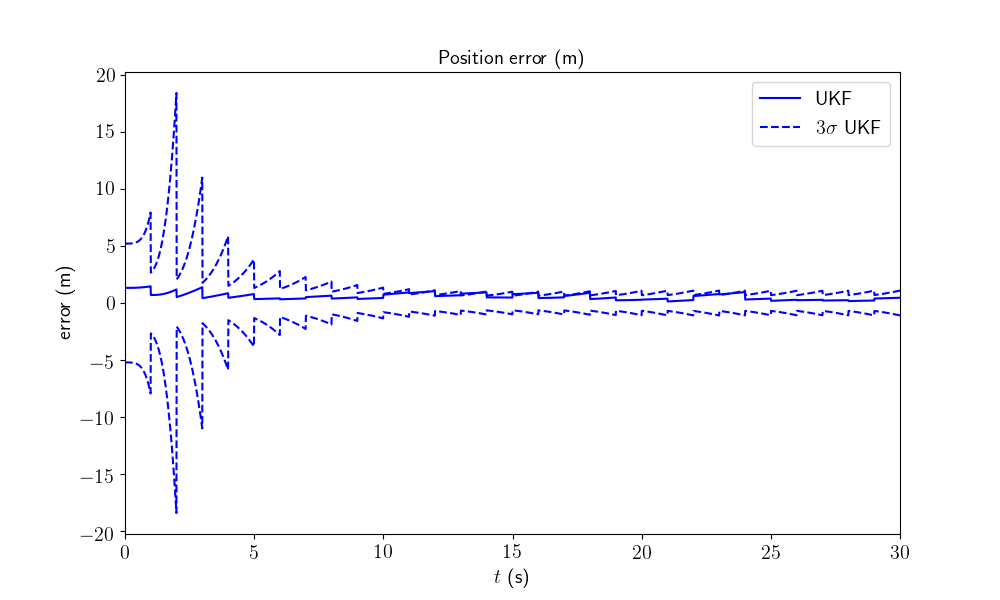
It seems that the proposed UKF meets difficulties and takes some time to converge due to the challenging initial conditions. A major problem of the UKF (in this problem and with this choice of retraction) is to be particularly overoptimism regarding attitude error, which is clearly outside the confidence intervals.
Conclusion¶
This script readily implements an UKF for estimating the 3D pose and velocity of a platform. Results are not particularly satisfying, since the filter difficultly converges to the true state even at the end of the trajectory. But is it not possible to improve the filter accuracy and consistency performances by inflating sensor noise parameters of the filter, or better, by defining a new retraction more adapted to the considered problem ?
You can now:
benchmark the UKF and compare it to the extended Kalman filter and the invariant extended Kalman filter of [BB17].
modify the model with a non-linear range and bearing measurement.
add and estimate sensor biases on the gyro and accelerometer measurements.
Total running time of the script: ( 0 minutes 13.803 seconds)