Pendulum Example
The set of all points in the Euclidean space  , that lie on the surface of the unit ball about the origin belong to the two-sphere manifold,
, that lie on the surface of the unit ball about the origin belong to the two-sphere manifold,

which is a two-dimensional manifold. Many mechanical systems such as a spherical pendulum, double pendulum, quadrotor with a cable-suspended load, evolve on either  or products comprising of .
or products comprising of .
In this script, we estimate the state of a system living on the sphere but where observations are standard vectors. You can have a text description of the spherical pendulum dynamics in [SE19], Section 7, and [KS19].
Contents
Initialization
Start by cleaning the workspace.
clear all; close all;
Model and Simulation
% sequence time (s) T = 10; % model frequency (Hz) freq = 100; % model noise standard deviation (noise is isotropic) model_noise_std = [1/180*pi; % orientation (rad) 1/180*pi]; % orientation velocity (rad/s) % simulate true states and noisy inputs [states, omegas] = pendulum_simu_f(T, freq, model_noise_std); % total number of timestamps N = T*freq; % integration step (s) dt = 1/freq;
The state and the input contain the following variables:
states(n).Rot % 3d orientation (matrix) states(n).u % 3d angular velocity omegas(n) % empty input
The model dynamics is based on the Euler equations of pendulum motion.
We compute noisy measurements at low frequency based on the true states.
% observation frequency (Hz) obs_freq = 20; % observation noise standard deviation (m) obs_std = 0.02; % simulate measurements [ys, one_hot_ys] = pendulum_simu_h(states, T, freq, obs_freq, obs_std);
We assume observing only the position of the state only in the  plan.
plan.
Filter Design and Initialization
We embed the state in  with left multiplication, such that:
with left multiplication, such that:
- the retraction
 is the
is the  exponential for orientation where the state multiplies the uncertainty on the left, and the vector addition for the velocity.
exponential for orientation where the state multiplies the uncertainty on the left, and the vector addition for the velocity. - the inverse retraction
 is the logarithm for orientation and the vector subtraction for the velocity.
is the logarithm for orientation and the vector subtraction for the velocity.
Remaining parameter setting is standard.
% propagation noise covariance matrix Q = blkdiag(model_noise_std(1)^2*eye(3), model_noise_std(2)^2*eye(3)); % measurement noise covariance matrix R = obs_std^2*eye(2); % initial uncertainty matrix P0 = blkdiag((45/180*pi)^2*eye(3), (10/180*pi)^2*eye(3)); % sigma point parameters alpha = [1e-3; 1e-3; 1e-3]; % define the UKF propagation and measurement functions f = @pendulum_f; h = @pendulum_h; phi = @pendulum_phi; phi_inv = @pendulum_phi_inv; % get UKF weight parameters weights = ukf_set_weight(6, 6, alpha); % compute Cholewski decomposition of Q only once cholQ = chol(Q); ukf_state = states(1); ukf_state.Rot = eye(3); ukf_state.u = zeros(3, 1); ukf_P = P0; % set variables for recording estimates along the full trajectory ukf_states = ukf_state; ukf_Ps = zeros(N, length(ukf_P), length(ukf_P)); ukf_Ps(1, :, :) = ukf_P;
Filtering
The UKF proceeds as a standard Kalman filter with a for loop.
k = 2; for n = 2:N % propagation [ukf_state, ukf_P] = ukf_propagation(ukf_state, ukf_P, omegas(n-1), ... f, dt, phi, phi_inv, cholQ, weights); % update only if a measurement is received if one_hot_ys(n) == 1 [ukf_state, ukf_P] = ukf_update(ukf_state, ukf_P, ys(:, k), ... h, phi, R, weights); k = k + 1; end % save estimates ukf_states(n) = ukf_state; ukf_Ps(n, :, :) = ukf_P; end
Results
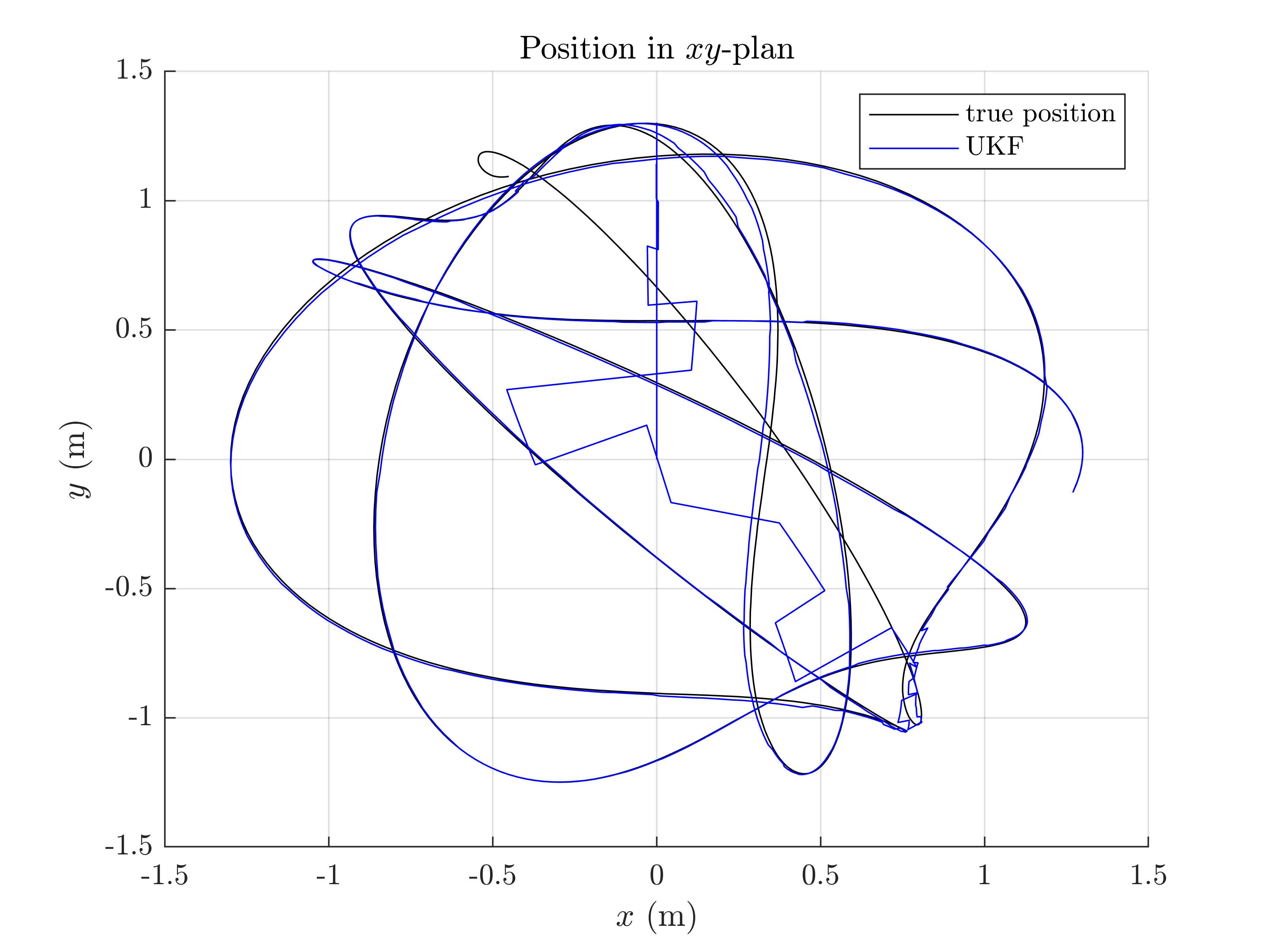
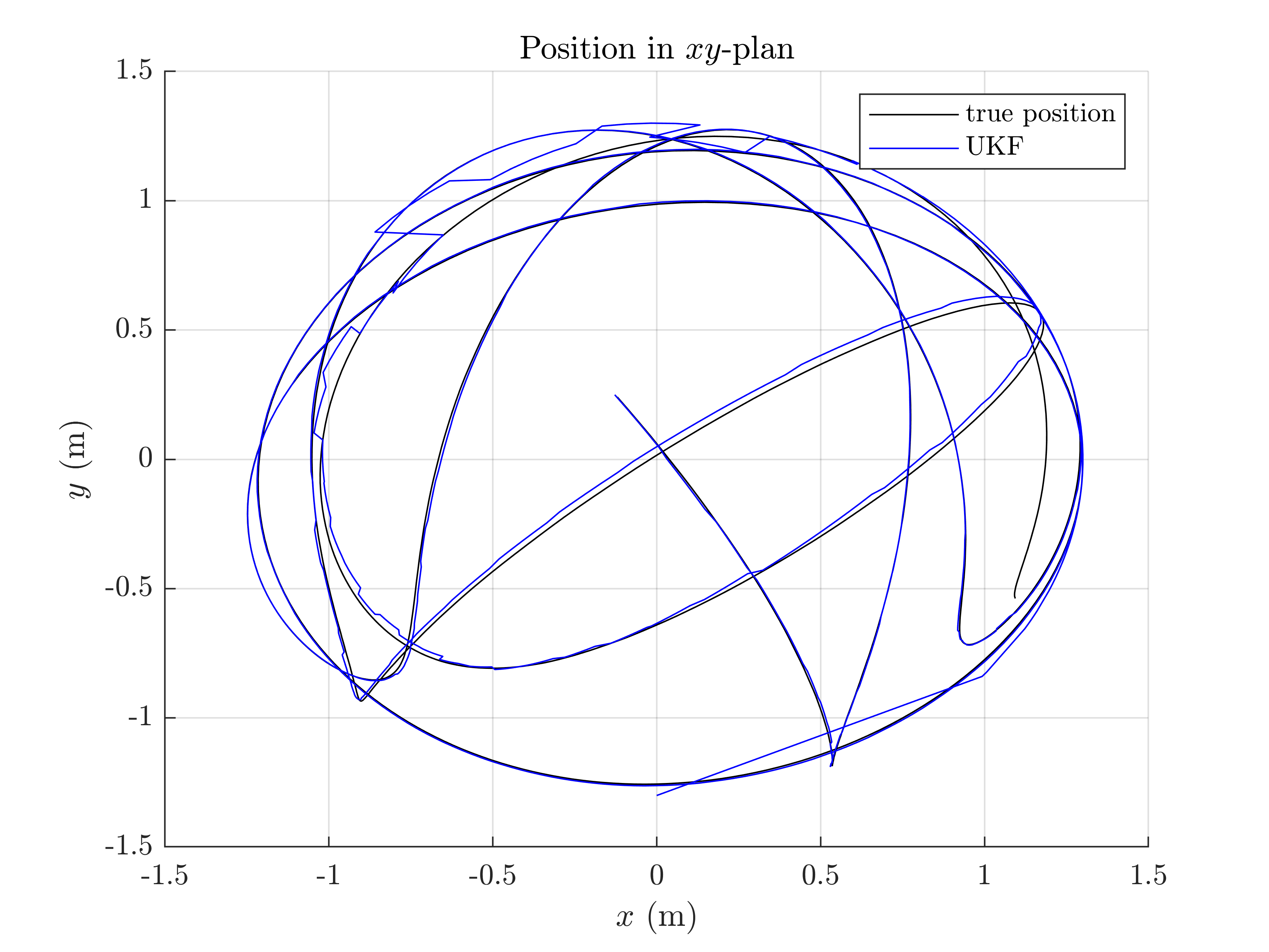
We plot the position of the pendulum as function of time, the position in the  plan and the position in the plan (we are more interested in the position of the pendulum than its orientation). We compute the
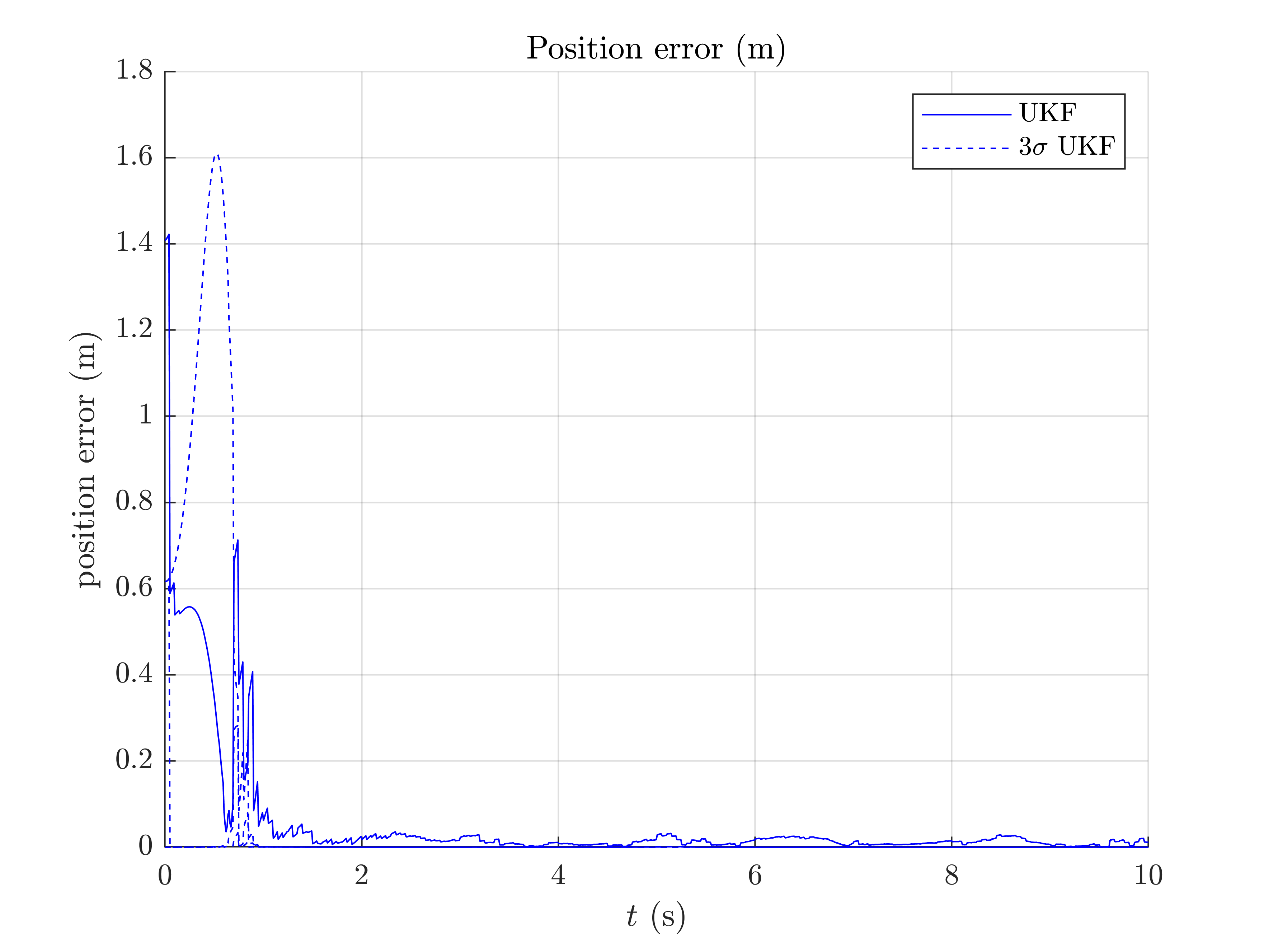
plan and the position in the plan (we are more interested in the position of the pendulum than its orientation). We compute the  interval confidence by leveraging the covariance retrieval proposed in [BBB19], Section V-B.
interval confidence by leveraging the covariance retrieval proposed in [BBB19], Section V-B.
pendulum_results_plot(ukf_states, ukf_Ps, states, dt);
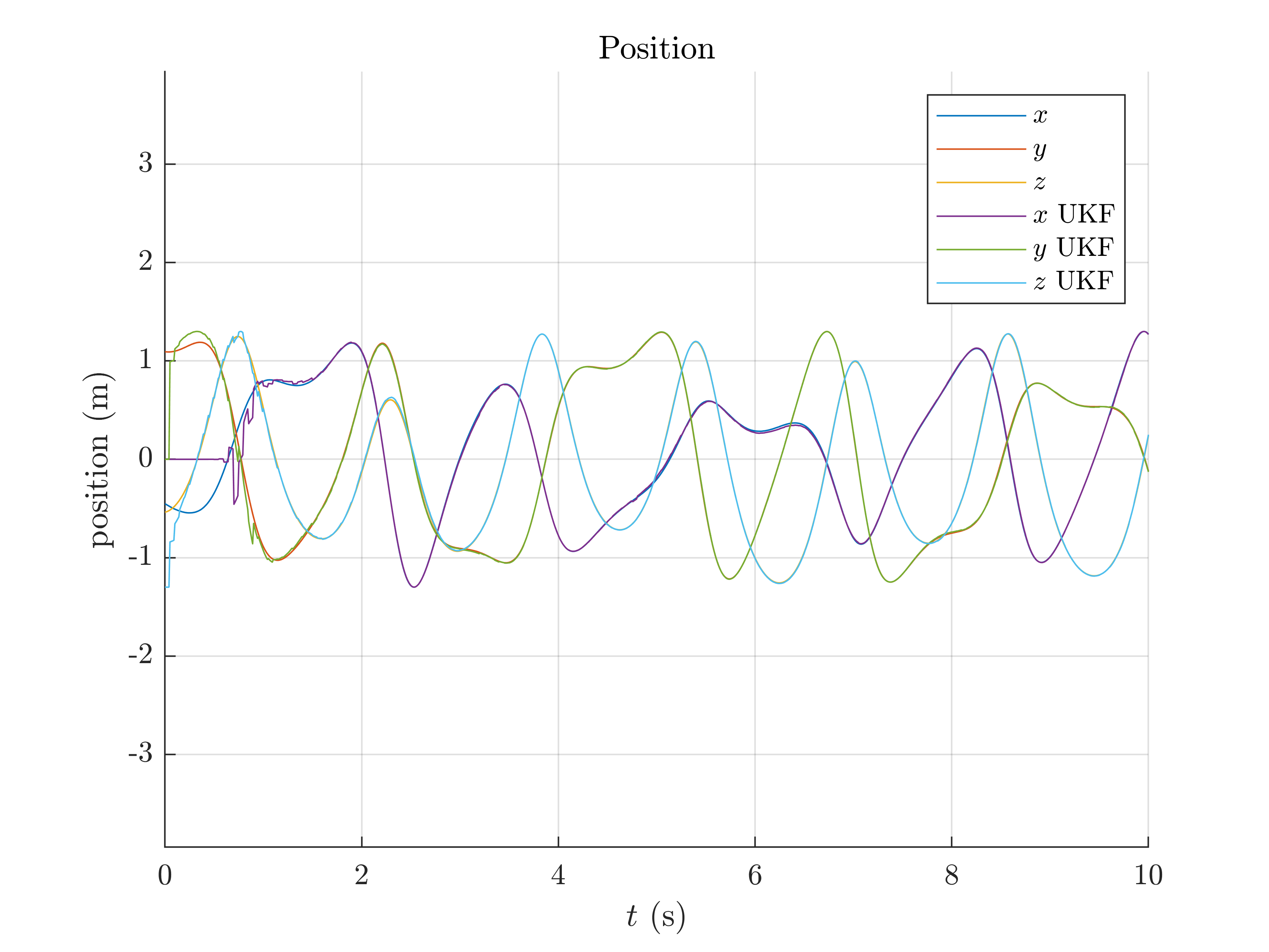
On the first plot, we observe that even if the state if unaccurately initialized, the filter estimates the depth position ( axis) of the pendulum whereas only the position of the pendulum is observed.
axis) of the pendulum whereas only the position of the pendulum is observed.
The second and third plots show how the filter converges to the true state. Finally, the last plot reveals the consistency of the filter, where the interval confidence encompasses the error.
Conclusion
This script shows how well works the UKF on parallelizable manifolds for estimating the position of a spherical pendulum where only two components of the pendulum are measured. The filter is accurate, robust to strong initial errors, and obtains consistent covariance estimates with the method proposed in [BBB19].
You can now:
- address the same problem with another retraction, e.g. with right multiplication.
- modify the measurement with 3D position.
- consider the mass of the system as unknown and estimate it.